Introduction
The TM series collaborative robots each have a payload rating, however they are derated as the payload moves further from the flange.
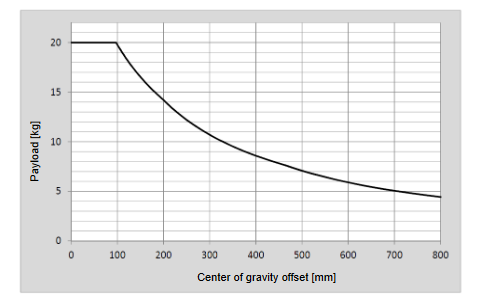
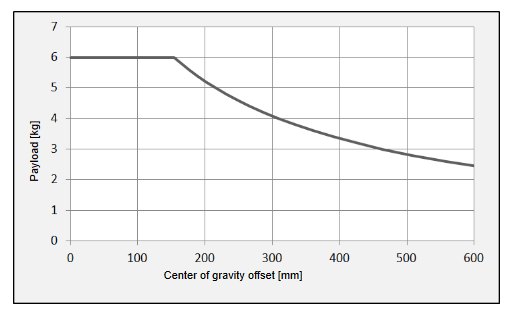
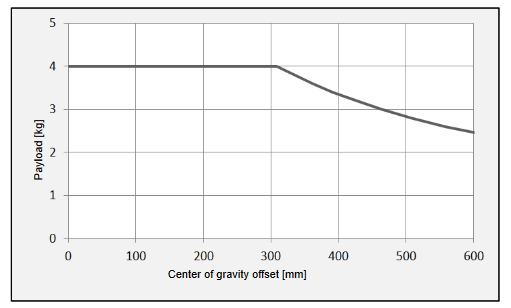
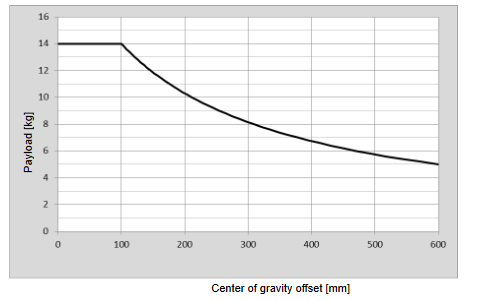
The maximum allowed payload of the robot arm is related to its center of gravity offset, which is defined as the distance from the center point of tool flange to the payload’s center of gravity. The tooling is included with the payload when calculating the payload center of gravity.
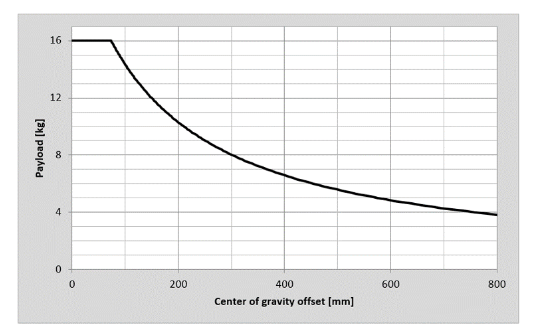
The following figures shows the relationship between payload and the center of gravity offset:
TM5-700
TM5-900
TM12
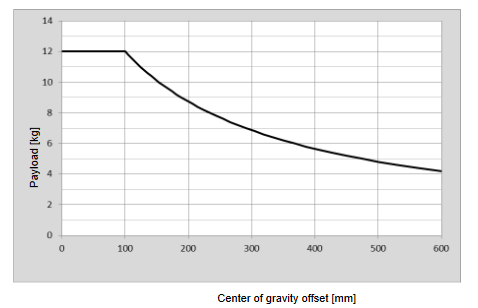
TM14
TM16
TM20